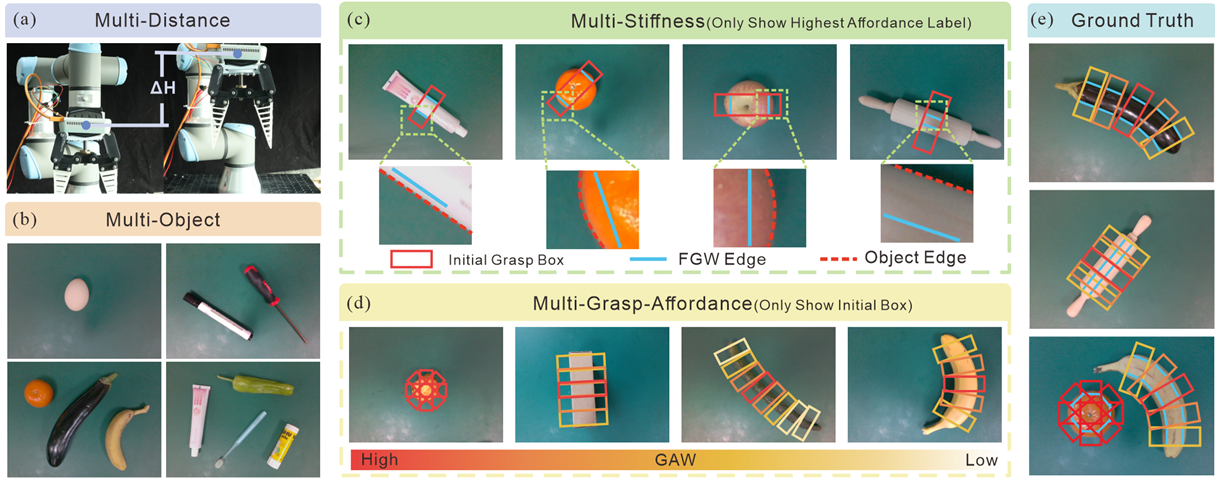
Real-world Grasping Demo
Comparative Demonstration of Final Grasp Width(FGW)
Comparative Demonstration of Grasp Affordance Weight(GAW)
Demonstration of Multi-Object Grasping
Demonstration of Grasping Various Objects